基于6D矢量的机器人动力学是由学者Featherstone首先提出,并被机器人其他很多动力学建模软件广泛应用。包括开源机器人软件kdl.
下面给出基于3D矢量和6D矢量的机器人动力学建模。
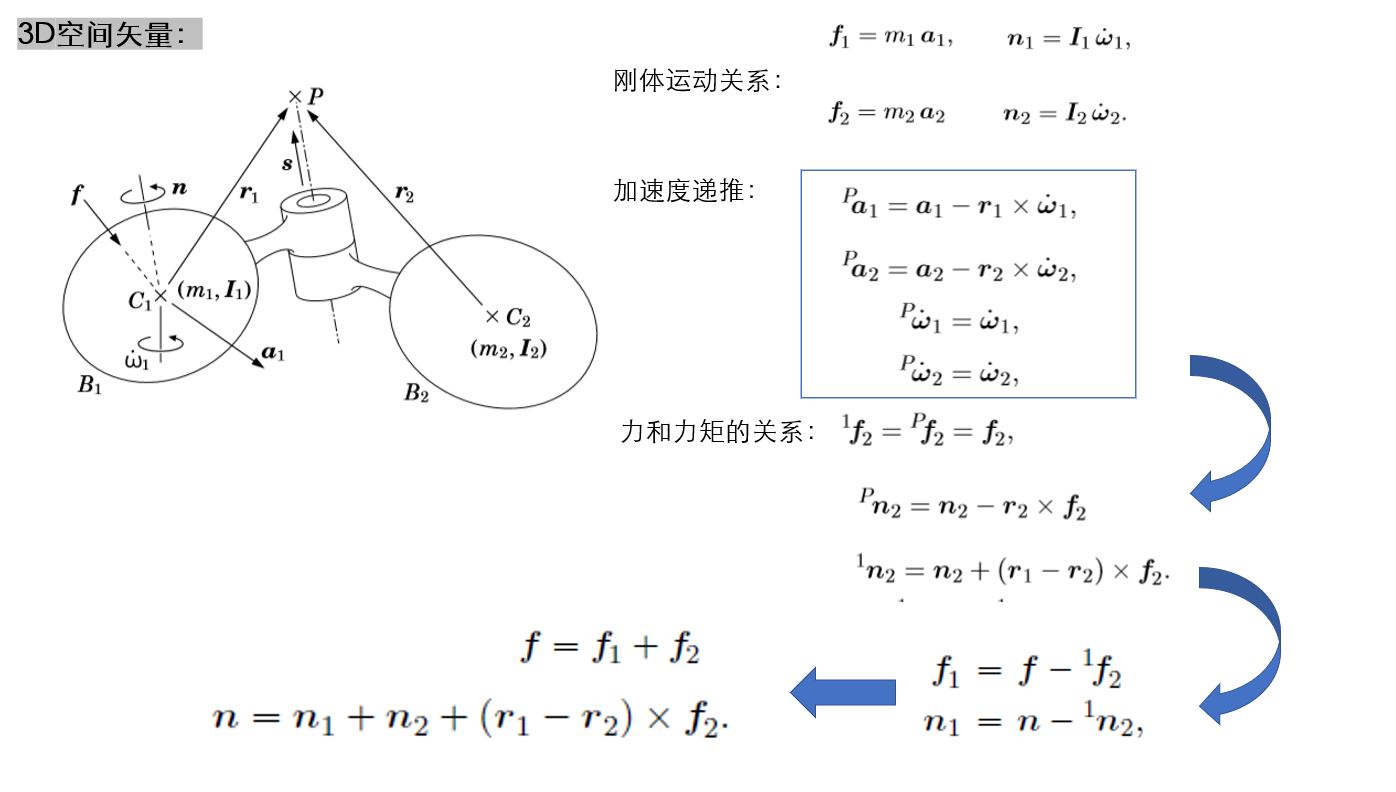
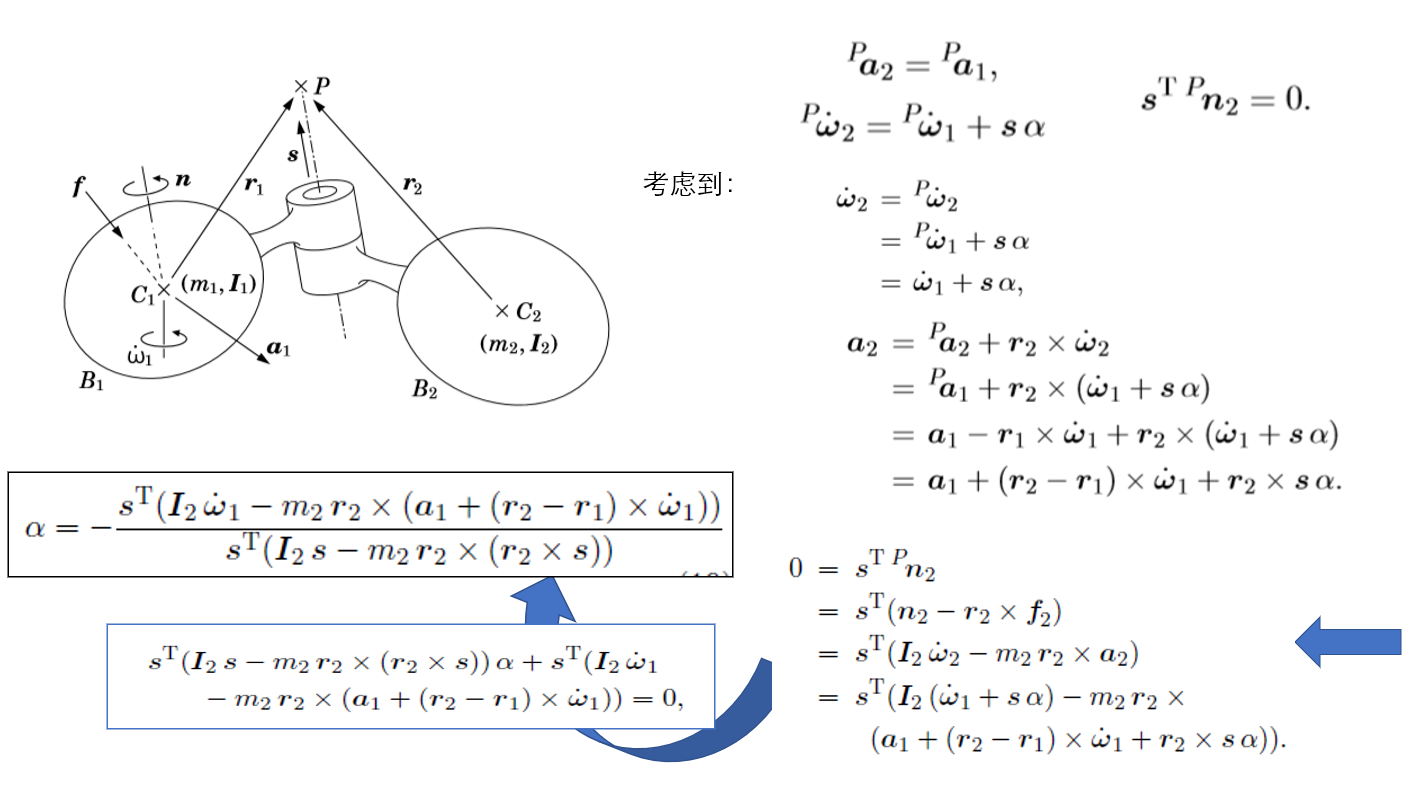
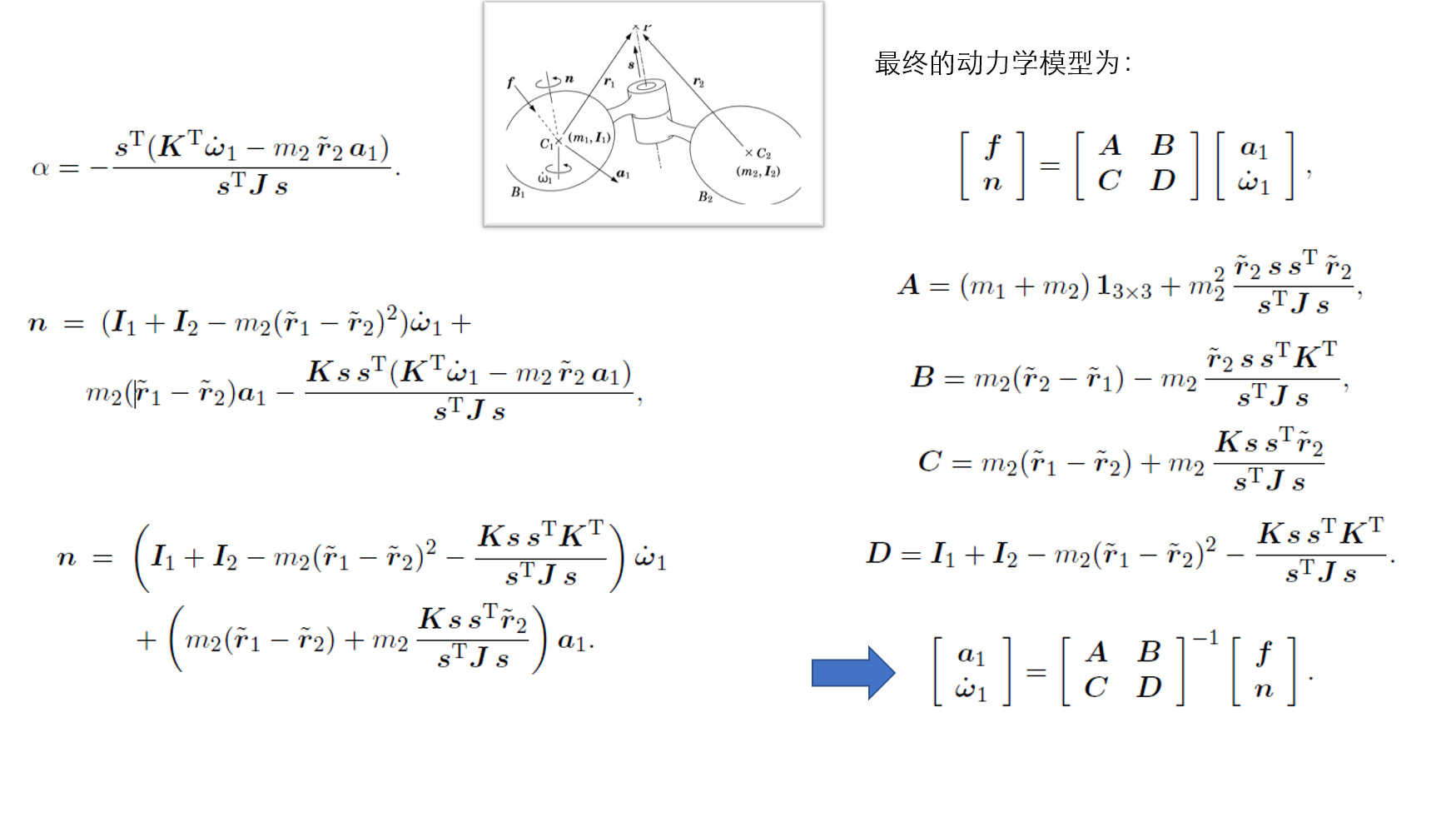
1 3D矢量
2 6D空间矢量
两个刚体和铰接成一个刚体,关节处无驱动力矩,是旋转轴。
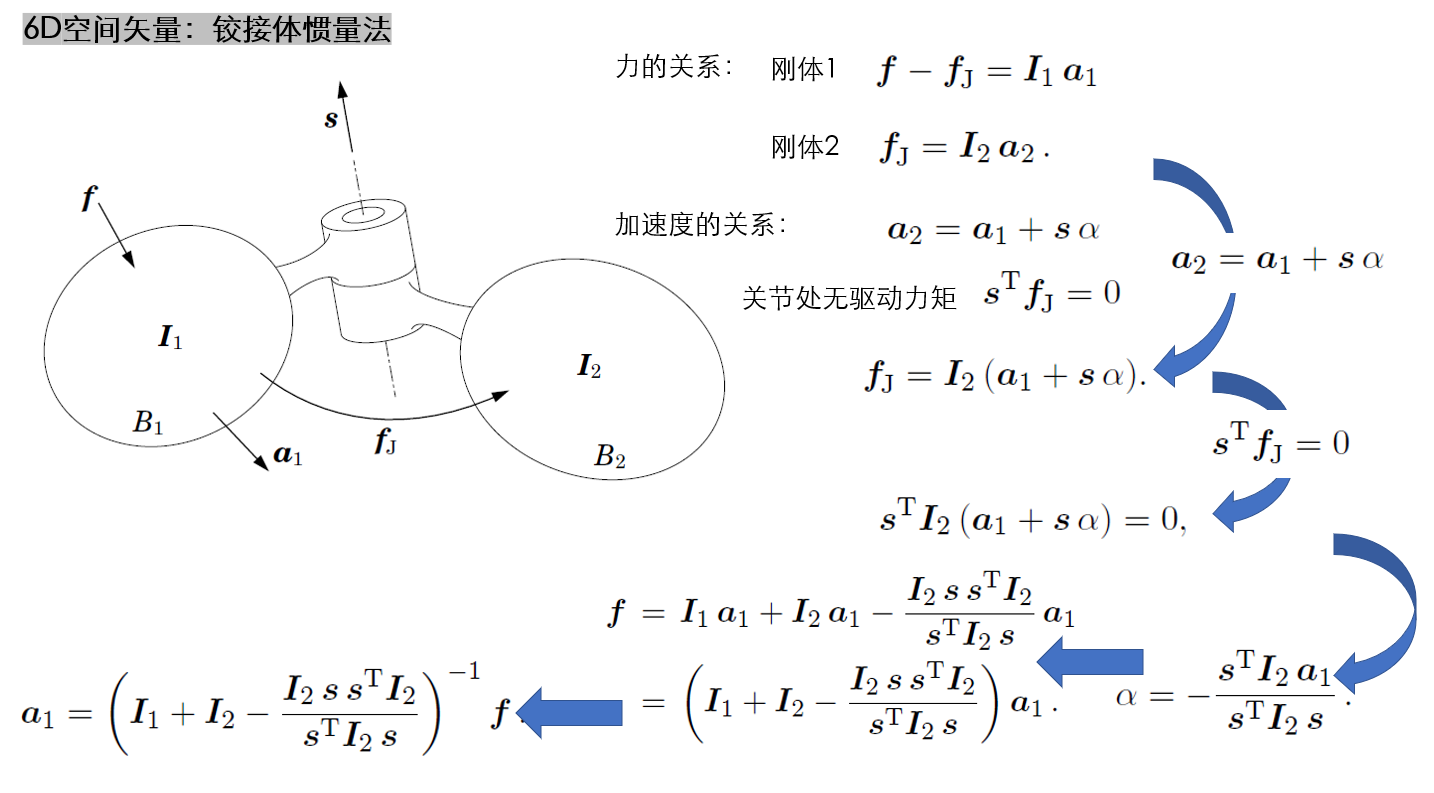
对比上述结果可以看出来,基于6D矢量和3D矢量建立的机器人动力学模型是完全一致的,而基于6D矢量的计算量则相对来说更小。
3 多体系统
铰接体(Articulated-Body, AB) 是指多个具有相对运动的刚体通过铰链连接而成的系统。对于铰接体来说,单刚体和多刚体的受力分析具体如下所示
- 铰接体惯量是对称正定矩阵;
- 铰接体惯量是从M 到F 的映射;
- 铰接体惯量遵循跟转动惯量相同的坐标变换规则;
当铰接体系统只包含一个刚体时, 铰接体惯量和偏向力与单个刚体的惯量和偏向力相同。 铰接体惯量只与每个刚体惯量和各个关节的约束形式有关,所以它是关节位置的函数, 而与关节速度或力无关, 从这方面来说, 铰接体惯量与广义惯性矩阵类似。
正文完