1 Rollin’ Justin

Rollin’Justin是灵巧的类人机器人,用于研究家庭和工业环境以及太空中的机器人应用。它可以接球,煮咖啡,并且正在学习修理卫星。
作者 German Aerospace Center (DLR) 2008
特征 能够操纵硬物体和软物体。配备兼容臂和碰撞检测。具有自主和遥操作模式。
高度 195厘米| 76.8英寸
长度 82厘米| 32.3英寸
宽度 82厘米| 32.3英寸
重量 199公斤| 438.7磅
速度 6公里/小时| 3.7英里/小时
传感器 立体声相机,陀螺仪,加速度计。
执行器 51台伺服电机
功率 52 V电池,工作1.5小时
电脑运算 四个带有Intel Core i7四核处理器的Mini-ITX板。
软件 QNX实时操作系统和带有自定义控制软件的Linux操作系统。
自由度(DOF) 58(头部:3自由度;手臂:7自由度x 2;手:13自由度x 2;躯干:3自由度;基础3自由度x 4)
网站 http://www.dlr.de/rm/desktopdefault.aspx/tabid-5471/
自1995年以来,DLR一直在开发轻巧的机器人手臂和手。2006年,研究人员将两只手臂,手和一个躯干组合起来,制造了第一个安装在桌子上的贾斯汀上身。 2008年,增加了带轮底座,并推出了Rollin’Justin。 2012年,当前系统配备了针对移动基地的改进控制系统和更新的计算平台。
2 ToRo
Toro是一种先进的人形机器人,用作研究平台,结合操纵和运动研究双足行走和自主行为。
German Aerospace Center (DLR)
YEAR 2013
特征 独立的,具有位置和扭矩控制模式。有效载荷为10公斤。基于KUKA-DLR轻型机器人(LWR)手臂驱动器。
高度 174厘米| 68.5英寸
长度 N / A厘米|不适用
宽度 N / A厘米|不适用
重量 76公斤| 167.5磅
速度 1.8 km / h | 1.1 mph(机械臂速度)
传感器 每个关节中的位置和扭矩传感器。每只脚踝均具有6自由度力/扭矩传感器。躯干和头部的惯性测量单位。华硕Xtion pro在头。头部有两个FLIR / Point Grey Firefly单色相机。头部装有一个英特尔实感SR 300。
执行器 手臂,腿部和臀部有25个电机驱动单元(基于LWR技术)。颈部有两个Dynamixel伺服电机。
功率 2个48V,6.6Ah锂离子锰氧化物电池组,工作1小时
电脑运算 躯干上有两台Intel Core i7计算机,头部有一台Intel Core i3计算机
软件 基于内核4的实时Linux。具有实时功能的中间件链接和节点(由DLR开发)。运行时可配置的硬件抽象框架Robotkernel(由DLR开发)。
自由度(DOF) 39(脖子:2自由度;手臂:6自由度x 2;腿部:6自由度x 2;臀部:1自由度;手:6自由度x 2)
材料 多数为定制零件。
网站 https://www.dlr.de/rm/desktopdefault.aspx/tabid-11678\
3 Robonaut NASA
2011年2月,NASA将Robonaut 2发射到了国际空间站。对于位于休斯敦的NASA约翰逊航天中心的机器人团队来说,这是一项巨大的成就。太空中还有其他机器人,但Robonaut是第一个执行超越地球任务的先进人形机器人。在国际空间站上,该机器人最终旨在与宇航员并肩工作,执行一些乏味和重复性的任务,这些任务占用了大量的时间,而站上的人们可能会花费大量时间在科学和发现上。
4 Armar
Armar是一种在工业环境中充当助手的机器人。它的人形外形使其可以使用电钻和锤子之类的人工工具。较早的版本是家庭佣工,可以打扫桌子并装载洗碗机.
作者 Karlsruhe Institute of Technology 2017
特征
双向和移动操作。从人类观察中学习。顺应性控制和物理人机协作。自然语言对话框。
高度 240厘米| 94.5英寸
长度 60厘米| 23.6英寸
宽度 60厘米| 23.6英寸
重量 150公斤| 331磅
速度 3.6 km / h | 2.2英里/小时
传感器 两个立体视觉系统(Roboception rc_visard 160和两个Point Grey Flea 3.0)和一个RGB-D传感器。手腕上的6D力/扭矩传感器。每个手臂关节中的传感器:绝对和增量位置传感器,扭矩传感器,9轴IMU。移动基座中有两个激光扫描仪。
执行器 16个无刷高转矩直流电动机(RoboDrive)和谐波驱动器。用于手臂的高度集成的定制传感器-控制器-控制器单元。每只手两个电机。
功率 48 V电池,2至3个小时的运行时间或220 V外部电源。
电脑运算 四台配备3.40 GHz Intel Core i7-6700 CPU,32 GB RAM,500GB SSD的高端PC。一个GPU GeForce GTX 1080,具有8 GB RAM。
软件 Ubuntu 14.04操作系统。 ArmarX(定制软件)。
自由度(DOF)27(头:2自由度;手臂:8自由度x 2;手:2自由度x 2;躯干:1自由度;移动平台:4自由度)
网站 http://www.humanoids.kit.edu
5 Arm
ARM是两臂机器人,旨在执行复杂的操纵任务。它是为DARPA的自主机器人操纵程序而创建的。它的正式名称是ARM,但您可以称他为Robbie。
COUNTRY United States 2010
特征 双向操纵,自主和遥操作模式,设计有市售零件,仿真套件。
高度 198厘米| 78英寸
宽度 274厘米| 107.9英寸
重量 204公斤| 449.7磅
速度 N / A km / h |每小时N / A
传感器 立体声相机,高分辨率相机,激光雷达,立体声麦克风,位置传感器(在关节中),力扭矩传感器(末端执行器)和触觉传感器(手指和手掌)。
执行器 电缆驱动的Barrett WAM手臂和Barrett手。
电脑 PC / 104堆栈,用于对WAM进行板载,低级控制。传感器处理,路径规划和所有高级功能均在双四核Intel Xeon计算机上在板外执行。
软件 PC / 104上的Linux和外接计算机。机器人操作系统(ROS)作为主要软件平台。
自由度(DOF) 26(脖子:4自由度;手臂:7自由度x 2;手:4自由度x 2)
材料 主要用于WAM臂和传感器的铝;躯干和支撑结构用钢。
网站 http://www.thearmrobot.com
在吉尔·普拉特(Gill Pratt)博士的带领下,DARPA的自主机器人操纵(ARM)计划致力于开发硬件和软件,以显着提高机器人操纵物理世界并与之互动的能力。 ARM机器人是作为用于算法研究和开发的测试平台而构建的,这些算法可以以最小的方向快速执行人员级任务。在2010年,该计划的第一阶段选择了六个机构,每个小组都配备了一个单臂机器人来进行工作。在2011年末,DARPA评估了每个小组的表现,随后启动了该计划的第二阶段,该阶段的重点转向复杂的双手操纵方案。该计划还包括一个外展部分,其目的是向机器人社区和公众展示未来如何使用开发的技术,并使人们普遍对机器人技术和工程技术感到兴奋。
6 YuMi ABB

ABB开发了集柔性机械手、进料系统、基于相机的工件定位系统及尖端运动控制系统于一体的协作型小件装配双臂机器人解决方案。YuMi代表未来的发展方向。YuMi将改变我们对装配自动化的固有思维。YuMi是“you and me”
7 PR2
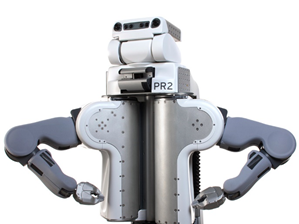
PR2是有史以来最先进的研究机器人之一。它强大的硬件和软件系统使它能够进行诸如清理桌子,折叠毛巾以及从冰箱中获取饮料之类的事情。
COUNTRY
United States 2010
特征 配备ROS和其他开放软件模块。能够自主导航并处理各种对象。
高度 165厘米| 65英寸(伸缩式脊椎扩展)
长度 66.8厘米| 26.3英寸
宽度 66.8厘米| 26.3英寸
重量 226.8公斤| 500磅
速度 3.6 km / h | 2.2英里/小时
传感器 带有广角和窄角立体摄像头,Microsoft Kinect和5百万像素摄像头。带有倾斜的Hokuyo UTM-30LX激光扫描仪和Microstrain 3DM-GX2 IMU的躯干。带有以太网摄像机,三轴加速度计和指尖压力传感器的手臂。 Hokuyo UTM-30LX激光扫描仪的移动底座。
执行器 32个有刷直流电机
功率 1.3 kWh锂离子电池组,运行2小时
电脑运算 两个Intel i7 Xeon四核处理器,24 GB内存,500 GB内部硬盘驱动器和1.5 TB可移动硬盘驱动器。
软件 ROS(机器人操作系统)和其他开源软件包,包括OpenCV视觉库和PCL 3D点云处理库。
自由度(DOF) 20(手臂:4 DoF x 2;腕部:3 DoF x 2;夹爪:1 DoF x 2;头云台:2 DoF;头激光倾斜度:1 DoF;伸缩式脊椎:1 DoF;不包括移动基座致动器)
网站 http://www.willowgarage.com
8 Baxter

United States 2012
特征 配有主动和被动安全系统以及用户友好的控制界面。能够根据视觉和力感控制运动。
高度 94厘米| 37英寸(腰到头)
长度 37厘米| 14.6英寸
宽度 260厘米| 102.4英寸
重量 75公斤| 165磅(不包括基座)
速度 N / A km / h |每小时N / A
传感器 五台相机(头上一台,胸部两台,前臂各一台)。基于串联弹性执行器的力感测。带有声纳阵列的头部,用于检测附近的人。
执行器 带无刷直流电机,金属和塑料齿轮箱以及定制弹簧元件的系列弹性执行器。
功率 标准110V电源
电脑运算 躯干内部基于Intel的主计算机。臂内基于ARM的电机控制器板。
软件 Linux OS和具有ROS(机器人操作系统)集成的自定义控制软件。
自由度(DOF) 16(手臂:7 DoF x 2;头部:2 DoF)
材料 铸铝,热塑性塑料,粉末金属零件。
9 HRP-4
HRP-4是世界上最先进的类人动物之一,是十年研发的高潮。它旨在与人类合作,并且可以执行非常自然的,类似于人类的运动。
CREATOR Kawada Industries and AIST Japan 2010
特征
紧凑,轻巧的设计。每只手臂能举起0.5千克(1.1磅)。配备低功率电机,以提高安全性。
高度
151厘米| 59.4英寸
重量 39公斤| 86磅
速度 N / A km / h |每小时N / A
传感器 摄像头(头部和手臂),麦克风。
执行器 80瓦电动机和低功率电动机
电脑运算 具有Wi-Fi和扬声器的PC / 104 Pentium M计算机。
软件 带有RT-PreemptPatch和OpenRTM-aist中间件的Linux操作系统。
自由度(DOF) 34(腿:6自由度x 2;脖子:2自由度;胸部:2自由度;手臂:7自由度x 2;手:2自由度x 2)
网站 http://global.kawada.jp/mechatronics/hrp4.html
10 Hubo 2

Hubo 2是可行走,奔跑,跳舞和抓物体的大型人形生物。它采用了直腿行走步态,这是对大多数双足机器人的改进,后者使膝盖弯曲以保持平衡。
CREATOR KAIST South Korea 2009
特征 模块化,轻巧的设计。高性能执行系统,针对动态任务进行了优化。
高度 125厘米| 49.2英寸
长度 N / A厘米|不适用
宽度 N / A厘米|不适用
重量 45公斤| 99.2磅
速度 1.5 km / h | 0.9 mph(步行); 3.6 km / h | 2.24 mph(行驶)
传感器 相机,三轴力扭矩传感器,两轴惯性传感器,两轴倾斜传感器。
执行器 44个无刷直流电动机(19 200 W的48 V电动机,6个100 W的48 V电动机,9个11 W的48 V电动机和10个0.75 W的12 V电动机)。
功率 48V锂聚合物电池
电脑运算 两台带固态驱动器的PC / 104嵌入式计算机
软件 Windows XP,带有RTX(实时扩展)。
自由度(DOF)40(脖子:3自由度;手臂:7自由度x 2;手:5自由度x 2;躯干:1自由度;腿:6自由度x 2)
材料 硬塑料外壳,铝制骨架。
网站 http://hubolab.kaist.ac.kr
11 Asimo

Asimo是一种拟人化的机器人,旨在为人们提供帮助。它可以跑步,跳舞,跳跃和踢足球。它作为robokind的大使环游世界,使人类对机器人技术感到兴奋。
作者 Japan 2000
特征 能够在人类环境中导航,识别面孔并理解语音。基于ZMP(零力矩点)控制方法的双足步行。
高度 130厘米| 51.2英寸
宽度 45厘米| 17.7英寸
重量 48公斤| 105.8磅
速度 9公里/小时|每小时5.6英里2.7公里/小时| 1.7 mph(步行)
传感器 头戴相机和麦克风。陀螺仪和加速度计的躯干。脚带有六轴力传感器。手在手掌上带有触觉传感器,而每个手指上都有力传感器。
执行器 超过26个直流电动机和无刷直流电动机。
功率 51.8V锂离子电池,工作1小时
软件 VxWorks实时操作系统和自定义控制软件。
自由度(DOF) 57(头部:3自由度;手臂:7自由度x 2;手:13自由度x 2;臀部:2自由度;腿部:6自由度x 2)
材料 主体由覆盖有塑料树脂的镁合金框架制成。
网站
http://asimo.honda.com