1 机器人与数控加工中心
说到智能化设备,首先想到的是机器人与数控加工中心。至于二者,均是工业4.0时代的重要加工媒介和工具,是支撑工业智能化时代的重要组成设备。但是二者的具体区别到底在什么地方尼?
二者的区别首先外观是不一样的,其次系统选择的电机功率和类型以及传动系统也是千差万别,但是本文主要是从机器人学的具体支持来分析二者的不同之处。
从控制的角度来说,数控机床主要强调的零件加工工序与机床的进给轴和主轴控制,即机床在设计的过程中已经将机床自身的笛卡尔运动解析出来,即各个轴之间的进给运动不会相互干扰,与此同时,进给轴的运动也不会影响主轴的运动。因而对于数控加工中心来说,其运动主要是基于笛卡尔空间,而没有各个关节空间或者轴空间的概念。
相反,对于机器人,其一般是运动无法解析的多体系统,即机器人末端的运动是通过各个关节运动带动的,即机器人笛卡尔运动一般是无法直接解析的,即直接根据笛卡尔的XYZ轴的驱动实现。
二者最直观的控制区别是笛卡尔运动解算中,前者不涉及逆向运动学,而后者涉及到逆向运动学。


2 机器人是多刚体系统
一般来说,机器人属于典型的多体系统,考虑到机器人的工业与特殊应用环境,一般来说,机器人可以视为多刚体系统,即机器人的各个组成部件均视为刚性体,机器人的连接与传动也视为刚体。而对于部分协作性机器人,由于系统柔性主要在于关节部分的传动系统,且关节柔性对于机器人笛卡尔控制来说影响不是很大,一般也视为多刚体系统。
我们目前见到的大部分机器人的控制器设计也均是按照多刚体机器人系统的控制器设计。多刚体系统的机器人的动力学方程可以统一采用如下所示方程来描述
M(q)¨q+C(q,˙q)+G(q)=τ
系统中q 是用来描述机器人运动状态的广义坐标
多刚体系统视为单刚体系统的拓展,有多个单刚体连接而成的多自由度系统成为多体系统,多体系统使得系统的灵活性增加,可以通过合理的自由度配置实现复杂任务。机器人即是典型的多体系统,多体系统的最高峰是人形机器人。人形机器人看似高不可攀,但是其本质上是多刚体系统,多刚体系统的控制主要是借助整个系统的雅克比矩阵。而分解来看,类人型机器人的主要是双臂+双腿+腰部+头部。
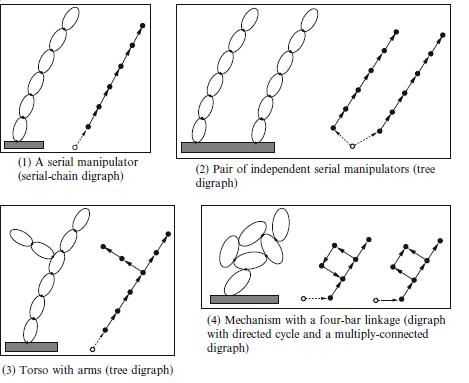
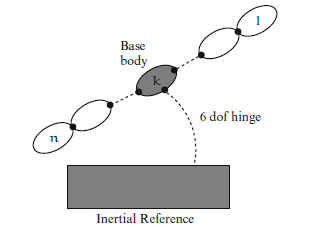
对于漂浮基座的机器人,其拓扑图可以采用如下所示,即地面与机器人基座之间采用6自由度虚拟铰链连接。
多刚体系统的运动学、动力学和控制相对来说较为成熟。目前大都数的机器人都属于多体系统,从这个角度看机器人的设计和控制变得相对简单一些。
3 机器人齐次变换矩阵
刚体的位置通常采用位移矢量表示,刚体的姿态采用欧拉角、RPY角等表示。但是在机器人学中,刚体的位置和姿态(简称位姿)采用统一的齐次变换矩阵来表示。齐次变换矩阵的主要作用是采用统一的架构来实现机器人的位置和姿态变换,从而使得机器人的位姿改变直接采用齐次变换矩阵的左右乘来实现。
考虑两个向量之间的变换关系,采用矢量的方式可以表示如下:
上式可以表示为:
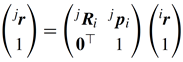
因而齐次变换可以表示如下所示:
考虑到机械臂的N个关节角度,q=[q1...qn]T ,运动学通过机器人的齐次变换矩阵来求解
4 机器人学究竟指那些内容
机器学主要涉及的点包括以下几个大的方面:
机器人构型设计主要包括:机器人总体构型设计(包括自由度配置等),机器人核心组件方案设计(模块化关节),机器人关键部位(腕部)设计,机械手设计,末端执行器设计等。
机器人属于刚体系统,刚体的位置和姿态均有特定的描述形式。在机器人领域,机器人的位置和姿态统一称为位姿,而位姿的变换采用齐次变换矩阵表示。
机器人的运动学主要包含机器人的正向运动和逆向运动学。
如果按照机器人的运动量区分,也可以分为:
位置级正向运动学、速度级正向运动学、加速度级正向运动学;
位置级逆向运动学、速度级逆向运动学、加速度级逆向运动学。
机器人雅克比矩阵是沟通机器人关节空间变量与笛卡尔空间变量的桥梁。机器人的多体系统控制器设计离不开机器人的雅克比。某种程度上,机器人按照不同分离个体进行控制,需要考虑分离个体的雅克比;如果按照整体控制,则需要考虑整体的牙雅克比矩阵。
机器人的静力学对于机器人的控制仍然非常重要,因为大都数机器人的工作状态处于低速状态,低速运动状态,系统的动力学中静力学占了较大的比重。除此之外,静力学对于机器人系统设计中的载荷估计等发挥着重要的作用。
机器人的动力学分为机器人正向动力学和机器人逆向动力学。
机器人的正向动力学主要是根据机器人的关节驱动力矩以及关节的角度和速度来求解机器人下一时刻加速度,进而积分求解机器人的运动状态。机器人的正向动力学主要用于机器人的仿真,模拟机器人的实际运动。
机器人的逆向运动学是根据机器人的当前状态,即已知角度,速度和加速度求解机器人的关节驱动力矩。机器人的逆向动力学主要用于机器人的实际控制器设计中。
机器人的轨迹规划主要研究曲线的平滑过渡;
机器人的路径规划主要研究机器人的障碍回避等问题
机器人的柔顺控制主要是处理机器人的位置与外部作用力和力矩之间的关系。常见的实现方式包括阻抗控制、导纳控制和力位混合控制等。
多机器人的协同控制主要用于解决单个机器人无法完成的任务,包括协同搬运等。
机械臂和机械手协同控制,机械臂和机械手协同控制可以表述出更加拟人化的操控能力。
考虑机器人在运动学、动力学等参数不确定情况下的自适应控制。