1 PMSM电机本体模型建立
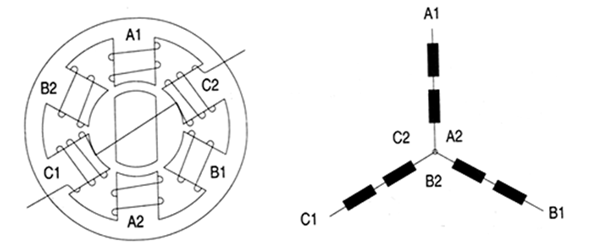
交流永磁同步电动机由定子、转子及位置传感器构成。定子为三相对称正弦绕组结构,转子贴有多对磁性体,多对磁极导致了电机的电角度与机械角度的倍数关系,位置传感器一般为光电编码器或旋转变压器,其结构如下所示:
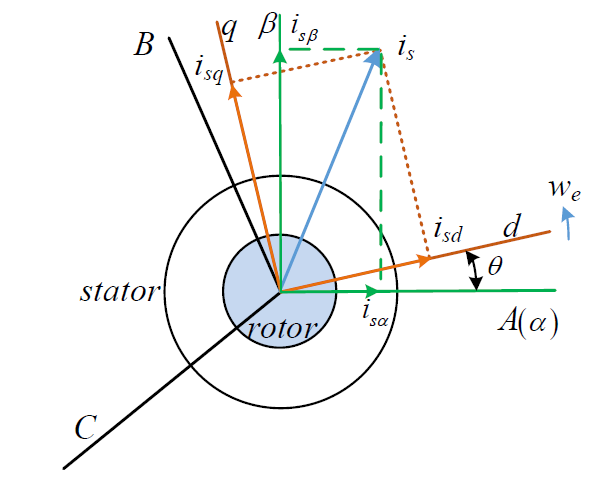
PMSM电机是将电能转换为机械能的装置,对电气端、机械端既有联系又有影响,对PMSM电机本体进行建模,首先建立PMSM的物理方程。由于电机绕组电气量为时变量,为方便建立方程,需要引进dq变换。dq变换需要引进三个坐标系,分别为三相定子A-B-C静止坐标系、两相定子静止α-β坐标系和d-q旋转坐标系,其中旋转坐标系的d轴与电机转子同步,三者的关系具体如下:
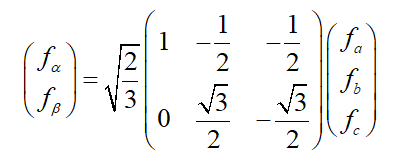
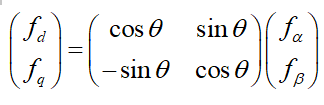
变换一般情况下分为两步进行,一步是变换,即将坐标系转换到坐标系,用表示电机定子电压、电流及磁链等物理量,按照变换前后功率不变的原则(需加变换系数),变换方程式为:
变换的另一步是变换,即将坐标系转换到坐标系,同上定义,变换方程式为:
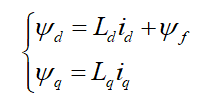
在dq变换完成之后,在理想情况下,定子的磁链方程公式如下所示:
定子的电压方程如公式
在考虑转换系数的情况下,电机输出的电磁转矩如公式
结合上述推导,可以将电机输出的电磁转矩归纳如下:
2 PMSM电机控制技术及其实现
电机本体对于电机伺服系统而言,仅仅是系统的执行机构,对于一个完整的系统,伺服电机除了电机本体之外,还需要有传感器、电压逆变器、PWM波生成器、控制器以构成一个完整的系统。对于PMSM的控制国内外有许多方法,本课题所研究的电机采用了SVPWM控制方法.
不同的开断情况形成上图的六个基本有效矢量,并形成六个扇区。对于一个特定的电压矢量 都可以在六个扇区中找到,在每个调制周期中,用对应相邻的基本有效电压矢量,以及零矢量,通过与线性时间T_x, 和组合得到。通过上述原理,只有调制周期足够小时,才能等效地更精确。
为了在生成SVPWM过程中,使功率元件开断次数尽量少,一般采用七段式生成方案。它由3段零矢量和4段相邻非零矢量组成,开关顺序为
相应的作用时间分别为: ,根据上述方案,可以知道各个扇区的开断顺序,如表所示:
生成SVPWM时,首先要确定合成电压矢量所处的扇区,可采用如下方法。首先,确定标志变量。当,令,当 时,令,当 ,令,现先给出与其他变量的关系,
可以获得扇区与N的对应关系。为了计算每个基本矢量的作用时间,再引X、Y、Z三个变量,其定义如下式所示。
由于,(T_s为PWM调制周期),如果计算出,还需要进行饱和处理:
在经过饱和处理后,引入,三个变量,并令:
至此,可以得到与开关时间之间的关系.计算得到的值与等腰直角三角形进行比较,就可以生成三相的波形
3 PMSM电机伺服系统及其实现
通常情况下,运用SVPWM技术的控制方法如图