1 管道机器人研究背景
“管道”被广泛使用在煤气输送、水流疏导、石油化工以及热电蒸气传输领域,是日常生活中不可缺少的一环。管道与陆路、水路、空路运输工具一道,构成了油料、燃气的主要传送方式。这一方式,在欧美及产油地区十分普遍。尽管,在我们周围,管道林立,但由于大多深埋地下,因此,许多人往往忽略了它们的存在。
管道机器人是管内检测成败的关键。机器人需要适应复杂的管线结构,不管是垂直管段,或是管道拐点,无论身处何地都应行动自如。眼下,除“检测功能”外,使机器人具备“维修功能”的呼声也在日趋高涨。
然而,除“清扫、检测、维修”之外,管道机器人的功能研发,仍具有一定的局限性。现有的检测方式有:摄像头观测、模拟成像、色差判定锈蚀程度,以及无损伤接触式传感器辨别管材质变情况。

图片来源:here
2 管道机器人的运行条件
管道结构在机器人设计阶段中应被优先考量。管道结构的决定因素包括:管径、弯折、垂直、分叉、阀门等。机器人设计必须逐一应对这些因素。 影响管径变化的因素多种多样,其中最重要的因素在于阀门和异径管。通常情况下,阀门直径会小于管径,同时,两段管子衔接处也会出现管径变化。现有技术对于管径变化,具有一定的克服力,但针对其他复杂结构仍显乏力。尤其是拐点或螺旋结构,成为管道机器人的最大障碍。
分气管与主管连接并负责将流量分散到其他管道。分气管与主管连接处会出现开口。如图2-1a所示。若开口足够大,机器人可能会由主管进入分支管移动,并因此会出现像通过拐点时一样的卡塞现象。开口直径较小,机器人不会由主管道进入歧途。在此情形下,尽管机器人始终会沿主管行进,但很难避免机器人前端与分支管间的碰撞。一旦发生碰撞,会对机器人造成损伤,损伤严重的话,同样可能出现堵塞,甚至是造成断流现象。
3 管道机器人的移动方式
A 轮式驱动
“轮动式”沿用汽车的轮轴传动方式前行,“易于操控”是其最大亮点。通过机体袖珍化,可以应付各种狭窄管道,但面对斜角度大于30°或弯道密集的圆弧形管道时,则束手无策。因此,设计此款机器人时,应着重从这两点出发。Kawaguchi推出的“双磁铁轮式管道机器人”以及 visual inspection Technologies 生产的“Rovver 系列”都是这一家族中的代表作。
图片:here
B 履带式管道机器人
履带式管道机器人的应用也十分广泛,其结构示意图如图3-1所示,该机器人行走的推力来自履带。加拿大Inuktun Services 公司制造的 Min-Itracs 和 Micro Tracs,是最为常见的型号。二者均可实现“单体单行”和“多体联动”的混用,使用方式十分灵活。
履带式机器人的优势在于,无论管道内径是否均匀或凸凹不平,均可轻松通过。缺陷在于,单体无法变向操作,而连体作业时,受体积、长度的影响,无法应对狭小的作业空间。
图片:here
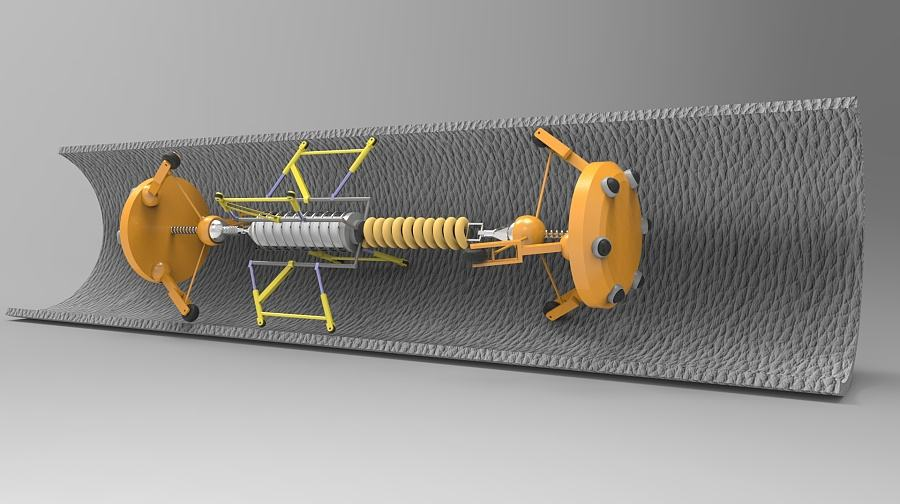
C 伸缩蠕动式
“轮式”也好,“履带式”也罢,无论哪款产品,都需要针对垂直管道,为克服自身重力,采用紧紧附着于管壁的方式,以获得足够的支撑和动力,“伸缩式机器人”是这一情况下最普遍使用的类型。它利用机械装置将轮子和履带紧贴管壁,以此产生对抗地球引力所需的摩擦力和前进力,实现自身移动。最具代表性的产品来自Okada和Fujiwara。
图片:here
D 分节式
管道机器人需要搭载传感器和维修设备行进,因此,“体积小、动力足”是必备条件。为此,必须提高设计技术含量,并实现零部件的微型化和轻量化,然而,在短期内尚无法获得有效的解决方案,分节式管道机器人由此应运而生。
E 绳索式
利用绳索牵引搭载感应器的检测方式,代表作为工业用内视镜。
F 紧贴式
紧贴管壁、占据大部分内径,并伴随管内流体前进的方式,Pipetronix出品的Pig系列最具象征性。此款设计的亮点在于,绝大多数机器人利用管内流体压力差行进,不需要外界动力源,全部能源均可用于探测设备。然而,当出现管径过大、无法紧贴的状况时,机器人便无法使用。
G步行式
采用多足机器人沿管壁爬行的方式。优点是在垂直管道中游刃有余,缺点是行进速度缓慢且结构过于复杂。以德国为代表的欧洲地区,一直着力研发此项技术
H 毛虫式
一部依托伸缩运动及附着管壁,像毛虫一样向前蠕动的机器。不难看出,其弱点在于缓慢的速度,而强项则是征服垂直的管道环境。