机械臂在不同环境下、不同任务条件下其控制的目的和策略也不同。当机械臂在自由空间中时,其主要进行位置和姿态的控制,根据任务轨迹的不同,其包括点到点的控制以及轨迹跟踪控制。当机械臂与环境接触时,机械臂与环境之间会产生接触力,为了完成既定的力控制或者与环境之间良好的接触,因此需要对交互力进行控制。对于冗余机械臂的控制即在非冗余机械臂的控制算法基础上加入冗余度的分解,而冗余机械臂的控制的关键在于运动学与动力学的优化。
1 机械臂的位置控制
机械臂的位置控制主要分为关节空间控制以及笛卡尔空间控制。
机械臂关节空间的控制需要由逆运动学模块将笛卡尔任务轨迹映射到关节空间,得到关节空间轨迹之后通过关节层控制器跟踪该轨迹。对于关节层控制器,最简单的为当机械臂运动较慢时,且传动部分选用大减速比,此时的机械臂系统可以看成是线性系统,其非线性耦合部分可以忽略,此时对各个关节采用 PD 控制。虽然基于独立的各个关节的 PD 控制的机械臂关节空间控制器具有渐进稳定性,但是无法保证所有任务点的稳定。
上述控制没有考虑机械臂的动力学模型,因此称为“非基于模型控制”。当机械臂运动速度较快,此时机械臂各部分之间非线性耦合严重。若要进行精确的位置控制,则需要考虑机械臂的动力学模型。即“基于模型的控制”,也即“动态控制”。这种基于模型的机械臂控制方案可以使得机械臂具有较好的动态性能。对于基于模型的机械臂的控制通常包括内控制回路以及外控制回路,如下所示。其中内控制环主要反馈动力学补偿量,其将非线性控制系统解耦为线性系统。其外控制回路中的控制器可以采用 PD 控制器,自适应控制器等。
上述提及的控制算法为关节空间机械臂的控制,对于基于该类型的机械臂控制过程中,需要根据逆运动学将笛卡尔轨迹转化为关节空间轨迹,进而关节空间控制器跟踪期望关节角度,从而间接达到笛卡尔位姿控制的目的。对于冗余机械臂的基于关节空间的位置控制,由于其笛卡尔任务与关节空间并不是一一映射关系,因此其关键在于如何有效的进行机械臂的逆运动学计算,由笛卡尔轨迹求解出关节空间轨迹。由于对于冗余机械臂其不存在运动解析解,因此通过速度级逆运动学求解各关节角度,因此一般采用基于冗余机械臂雅克比伪逆方法并通过优化目标函数的方法进行冗余机械臂运动控制。
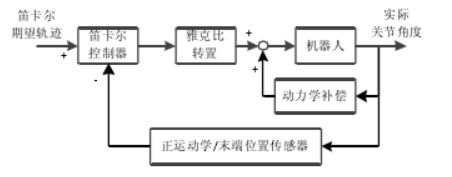
此外,对于机械臂的笛卡尔位姿控制,通过笛卡尔的位置控制器得到笛卡尔力,进而通过雅克比转置得到机械臂关节空间的驱动力矩。进而控制机械臂笛卡尔位姿。该方法可以称为“雅克比转置法”,其原理图如下图所示。对于冗余机械臂来说,该算法同样适用。
2 力/位置混合控制
机械臂的力/位混合控制最初由 Raibert 和 Criag 提出,也称为 RC 控制。该控制方法依据机械臂末端位置控制与环境接触力控制的正交性,在自由运动方向上进行位置控制,在与环境接触方向上进行力控制。该系统有位置反馈回路以及力反馈回路,其需要实时反馈机械臂当前位置以及力传感器检测到的环境作用力,其可以直接控制机械臂末端与环境接触的作用力。基于力/位混合控制的机械臂力控制系统有两个控制闭环,分别为位置控制方向位置控制闭环,以及力控方向力控制闭环。经典的 RC 控制器如下图所示。
由于力/位混合控制中位置控制以及力控制之间的独立性,因此在某些情况下,该控制方法在一些非奇异位置会出现不稳定现象。一方面由于经典的 RC 控制器中并未充分的考虑机械臂的非线性动力学耦合现象,为此 Khatib 等对经典的RC 控制器进行改进并设计了操作空间力/位混合控制系统;Yoshidawa 等提出动态力/位混合控制。另一方面,由于传统的 RC 控制在力和位置控制进行机械臂互环境接触的切换过程会造成系统不稳定,而动态力/位混合控制则具有更好的控制性能 z
3 阻抗控制
Hogan 指出,在约束和自由空间的力和位置控制无法有效的控制机械臂与环境的交互。因此,在其提出的阻抗控制理论中忽略位置控制和力控制子空间。机械臂阻抗控制通过位置与环境作用力的动态关系实现机械臂与环境的交互作用,由于该位置与力的动态关系与电路中的阻抗概念类似,因此称其为阻抗控制。阻抗控制依据任务执行空间的不同可以分为关节空间阻抗控制以及笛卡尔空间阻抗控制。按照控制系统内环回路的不同可以分为基于力的阻抗控制以及基于位置的阻抗控制.
目前应用较多的是基于位置的阻抗控制,该类型的阻抗控制任务规划较少,可以直接在机械臂的位置控制基础上实现。机械臂与环境之间的作用力通过机械臂末端六维力传感器得到,通过目标阻抗关系得到笛卡尔位置修正量。该类型的阻抗控制不直接控制机械臂与环境之间的交互力,而是通过机械臂与环境之间的相对位置调整作用力,其鲁棒性好,较易实现
4 混合阻抗
混合阻抗控制是一种结合力位混合控制和阻抗控制的方法,其最初由Anderson 和 Spong 提出
。在该控制策略中,任务空间被分为位置控制子空间以及力控制子空间。混合阻抗控制的思想为在保证柔顺性的前提下对机械臂任务空间中约束方向进行力控制、自由运动方向上进行位置控制,其控制系统原理如下图所示。其在力控制方向引入期望惯量以及期望阻尼阵,根据期望的目标阻抗关系机械臂在该方向上可以进行准确的力跟踪。且由于机械臂在位置控制方向上具有柔顺性,当机械臂与环境接触时,由位置控制切换到力控制则不会引起系统的不稳定,过渡平滑。
混合阻抗控制系统原理如图 。采用选择矩阵 S 确定位置控制空间以及力控制空间,其控制系统包括内外环,其内环一般为跟踪目标加速度的位置控制,根据内环位置控制器的不同,其可以分为基于关节空间混合阻抗控制,以及笛卡尔空间混合阻抗控制.
5 混合阻抗实例分析
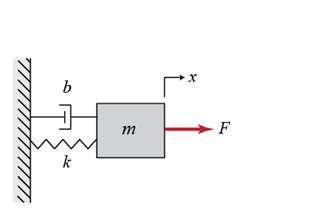
综合力/位混合控制以及阻抗控制的优缺点,混合阻抗控制在力控方向上具有较强的力跟踪特性以及位置控制方向具有较强的柔顺性。位置控制方向上采用笛卡尔基于位置的阻抗控制,机械臂等效为弹簧-质量-阻尼系统。该方向不进行力跟踪,但须保证柔顺性。其阻抗关系如图 所示,目标阻抗表达式如下
在机械臂力控制方向上,机械臂等效为质量-阻尼系统,设定其刚度为 0,从而实现精确的力控制。其阻抗关系如上图 所示,目标阻抗表达式为
[1]: 周诚. 空间七自由度冗余机械臂动力学建模与控制研究[D].哈尔滨工业大学,2014
[2]: Zhou C, et al. Hybrid task priority-based motion control of a redundant free-floating space robot[J]. 中国航空学报(英文版)