随着空间技术的不断发展和人类对空间探索的不断深入,空间机器人在完成诸如空间站的建造与维护等任务中发挥着重要的作用。
1 空间机器人质量属性
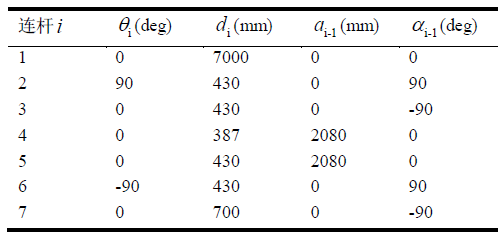
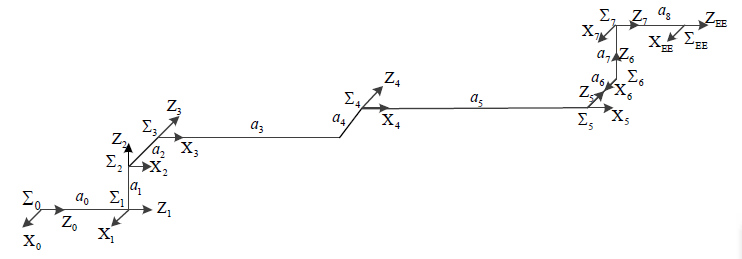
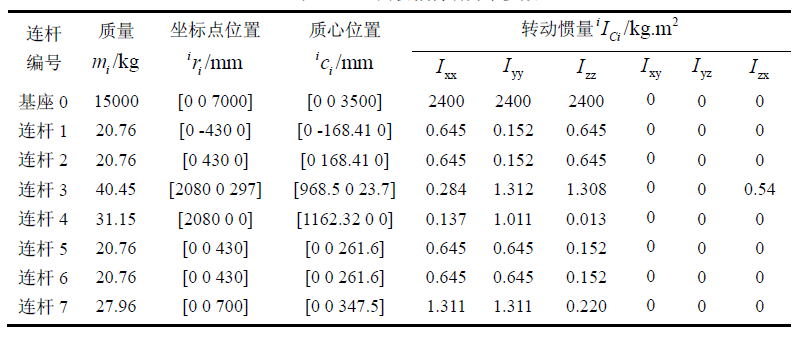
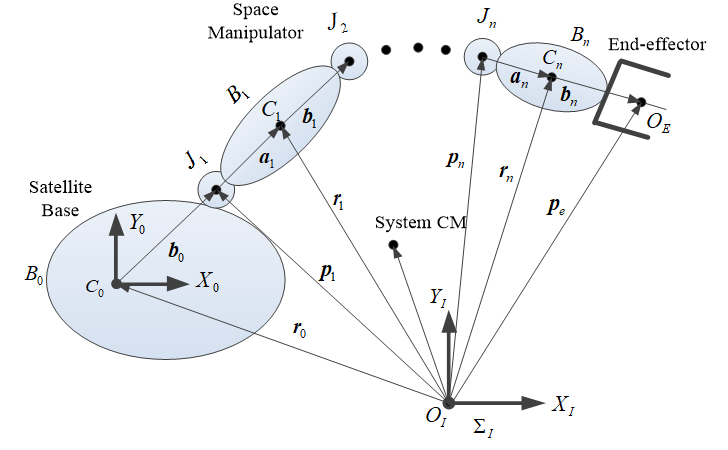
机械臂系统为多自由度开链(Open Chain)机械臂,对其物理模型假设如下:
- 忽略机械臂的弹性效应,将其看作为刚形体
- 关节只是连接相邻连杆,无柔性
- 该机械臂为串行结构,无支路且末端自由、不闭合
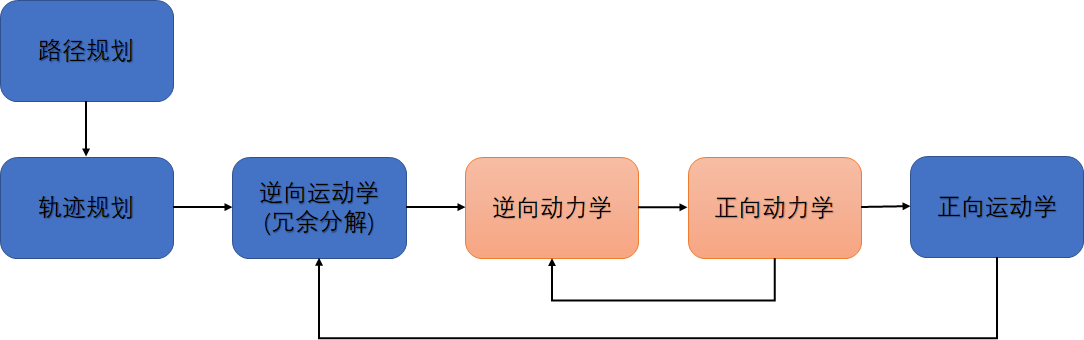
2 路径规划
空间机器人自由漂浮特性使得机械臂末端位姿与关节角得运动历史相关,同时存在动力学奇异现象。空间机器人由于基座处于自由漂浮状态,其系统为非完整系统,因而路径规划较为特殊。大都数的路径规划的目的是实现基座姿态无扰动控制、基座姿态调整控制等任务。相应的算法基本分为两类:
- 基于正运动学的路径规划:利用五次多项式描述关节轨迹,通过正运动学求解末端速度,对时间积分,得到非线性方程组,可通过牛顿迭代法、遗传算法、粒子群算法求解,回避动力学奇异,只适于离线规划
- 基于逆运动学的路径规划:通过末端轨迹计算末端速度,利用逆运动学求解关节角速度,采用逆回避动力学奇异
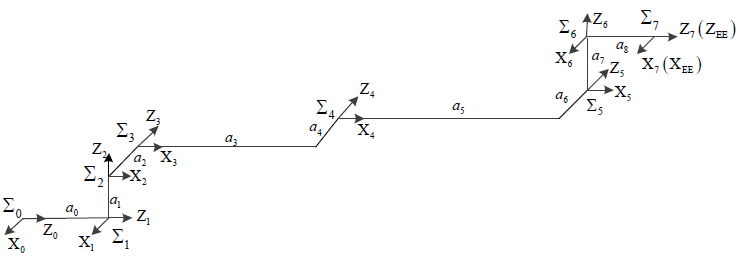
3正向运动学
自由漂浮空间机器人的末端位姿受关节角与基座姿态的共同影响。非完整约束特性又使基座姿态与关节角的运动历史相关。
对于自由漂浮空间机器人,无法得到位置级的运动学方程,一般多研究其速度级运动学建模。
- 正向运动学是指已知空间机器人相关参数及各关节角速度,计算机器人末端的速度与角速度。
- 采用Whitney矢量积法求解自由漂浮空间机器人正向运动学
广义雅可比矩阵既与空间机器人的运动学参数相关,又与其动力学参数相关。
4 逆向运动学
已知空间机器人相关参数及末端的速度与角速度,计算机械臂各关节的角速度
采用阻尼最小方差法求解自由漂浮空间机器人逆向运动学
5逆向动力学
已知空间机器人相关参数及各关节的角加速度,求解机械臂各关节驱动力(或力矩) 。
(1).运动学参数外推
(2).动力学参数内推
(3)关节力矩外推
6 正向动力学
自由漂浮空间机器人的基座并不固定,可添加一个六自由度的虚拟铰链将其与惯性系相连。
其主要包含以下三个重要步骤
(1).运动学参数外推
(2)动力学参数内推
(3)角加速度外推
典型空间机器人
空间机器人动力学建模方法汇总如下所示:
|
建模原理 |
算法特点 |
|---|---|
|
空间算子代数法 |
借助滤波理论,算法层次清晰,易于理解 |
|
铰接体惯量算法 |
铰接体概念,推导简单,计算量小 |
|
李群李代数法 |
避免复杂的微分与偏微分运算,计算效率高 |
|
虚拟机械臂法 |
多臂及闭环系统,虚拟假想臂 |
|
等价机械臂法 |
真正的机械臂,运算量大,模型不直观 |
|
广义雅可比矩阵法 |
计算量较小,常应用于运动控制等场合 |
|
拉格朗日法 |
推导简单,表达式复杂,运算量大 |
|
牛顿-欧拉法 |
由前向及后向递推运算组成,常用于逆动力学求解 |
|
罗伯森-维滕伯格法 |
利用图论描述拓扑结构,适用于非树系统 |
|
高斯方法 |
回避微分方程组求解,适用于闭环系统 |