机械臂在不同环境下、不同任务条件下其控制的目的和策略也不同。当机械臂在自由空间中时,其主要进行位置和姿态的控制,根据任务轨迹的不同,其包括点到点的控制以及轨迹跟踪控制。
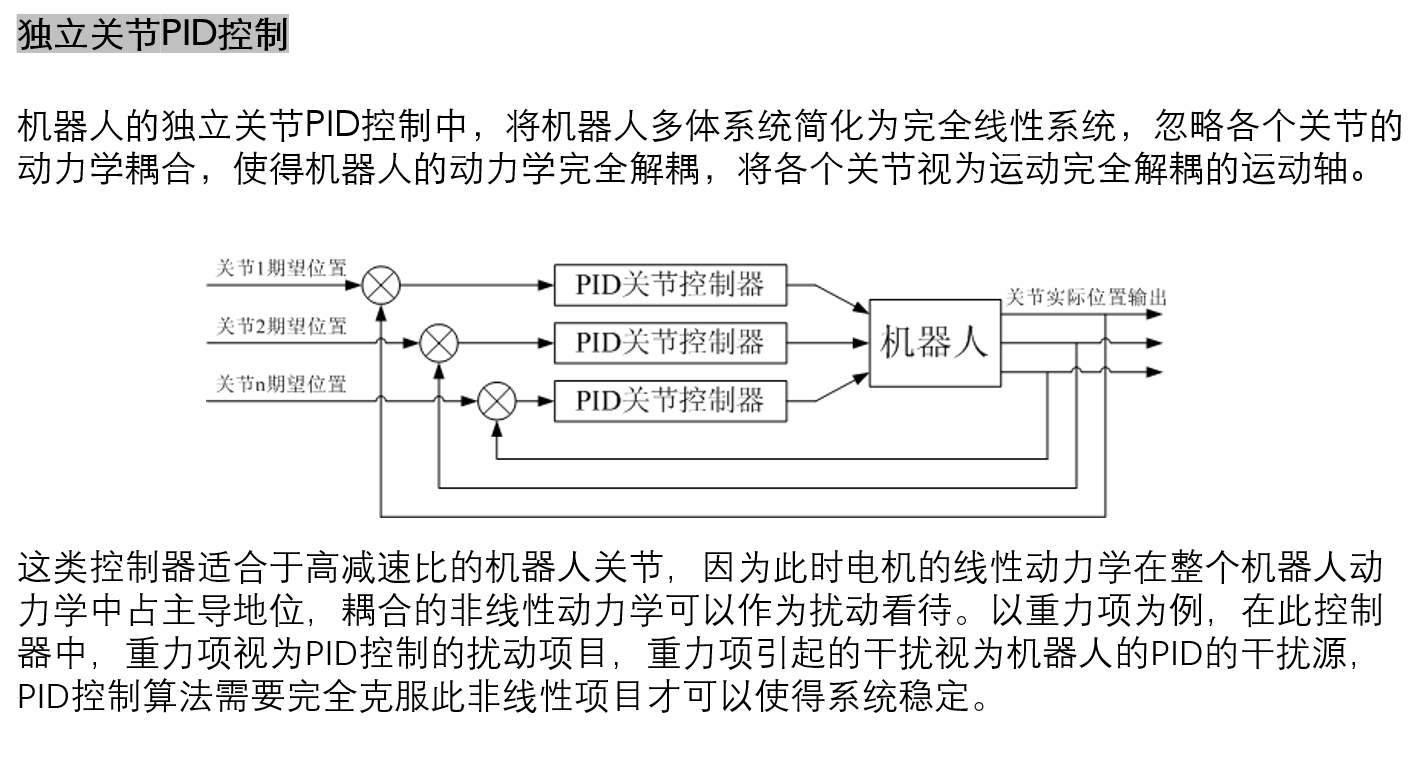
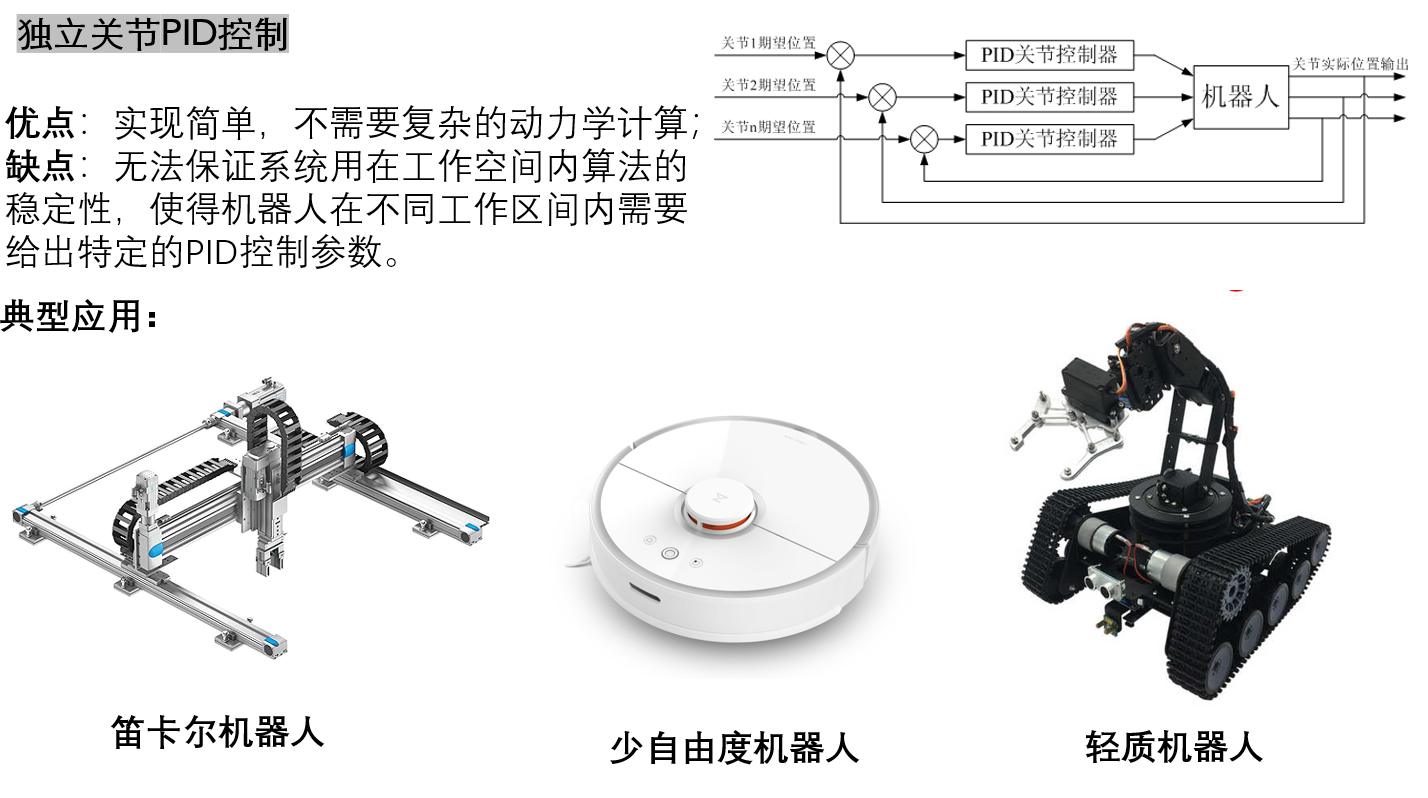
1 独立关节PID控制
机械臂关节空间的控制需要由逆运动学模块将笛卡尔任务轨迹映射到关节空间,得到关节空间轨迹之后通过关节层控制器跟踪该轨迹。对于关节层控制器,最简单的为当机械臂运动较慢时,且传动部分选用大减速比,此时的机械臂系统可以看成是线性系统,其非线性耦合部分可以忽略,此时对各个关节采用PD控制。虽然基于独立的各个关节的PD控制的机械臂关节空间控制器具有渐进稳定性,但是无法保证所有任务点的稳定。
2 机器人动力学前馈控制与反馈控制
上述控制没有考虑机械臂的动力学模型,因此称为“非基于模型控制”。当机械臂运动速度较快,此时机械臂各部分之间非线性耦合严重。若要进行精确的位置控制,则需要考虑机械臂的动力学模型。即“基于模型的控制”,也即“动态控制”。这种基于模型的机械臂控制方案可以使得机械臂具有较好的动态性能。对于基于模型的机械臂的控制通常包括内控制回路以及外控制回路,如下所示。其中内控制环主要反馈动力学补偿量,其将非线性控制系统解耦为线性系统。其外控制回路中的控制器可以采用PD控制器,自适应控制器等.
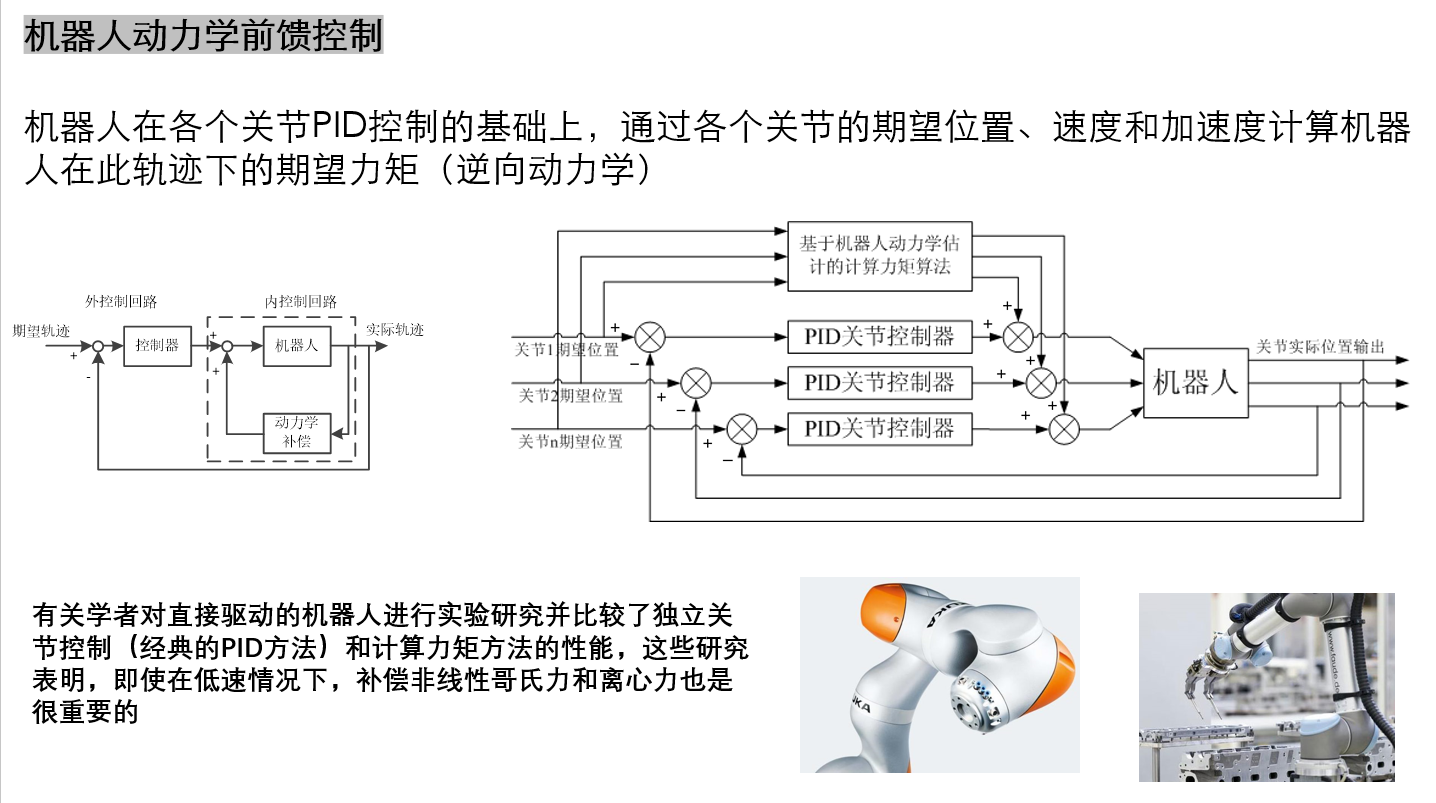
- 逆向动力学计算得到关节的补偿力矩;
- PID由控制算法转换为修正算法;
- 动力学有效补偿了机器人的非线性项;
- 前馈控制计算动力学是根据期望轨迹,反馈控制则是根据反馈的实际轨迹;
- 前馈控制需要机器人对期望轨迹进行有效跟踪,否则导致前馈项目的不准确性;反馈控制则允许机器人位置跟踪存在一定误差;
3 机器人雅可比转置控制
上述提及的控制算法为关节空间机械臂的控制,对于基于该类型的机械臂控制过程中,需要根据逆运动学将笛卡尔轨迹转化为关节空间轨迹,进而关节空间控制器跟踪期望关节角度,从而间接达到笛卡尔位姿控制的目的。对于冗余机械臂的基于关节空间的位置控制,由于其笛卡尔任务与关节空间并不是一一映射关系,因此其关键在于如何有效的进行机械臂的逆运动学计算,由笛卡尔轨迹求解出关节空间轨迹。由于对于冗余机械臂其不存在运动解析解,因此通过速度级逆运动学求解各关节角度,因此一般采用基于冗余机械臂雅克比伪逆方法并通过优化目标函数的方法进行冗余机械臂运动控制
4 关节空间控制与笛卡尔空间控制
机器人控制分为关节空间与笛卡尔空间控制..针对不同空间的控制主要决定于机器人的广义坐标的选择.如果选择关节角度, ,输入量是关节的驱动力矩, ;笛卡尔空间控制的广义坐标主要是笛卡尔的位置和姿态,输入量是笛卡尔空间的虚拟的驱动力和力矩.