1 动力学简述

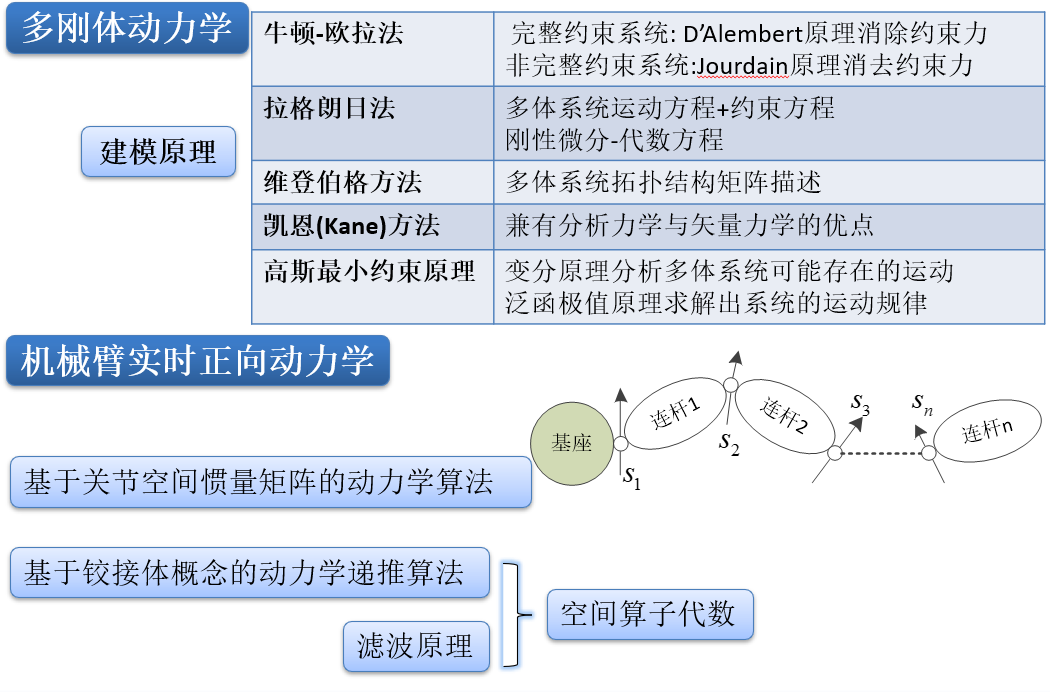
关于机器人动力学建模,之前已经在很多篇文章中给过具体的阐述。在这里,将机器人的动力学基本原理以及高效递推多体动力学具体阐述如下所示:



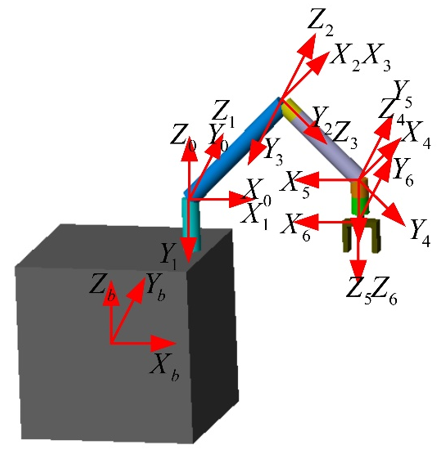
2 固定基座机器人动力学建模
算法流程包括:运动学量向外递推;铰接体惯量向内递推;加速度向外递推
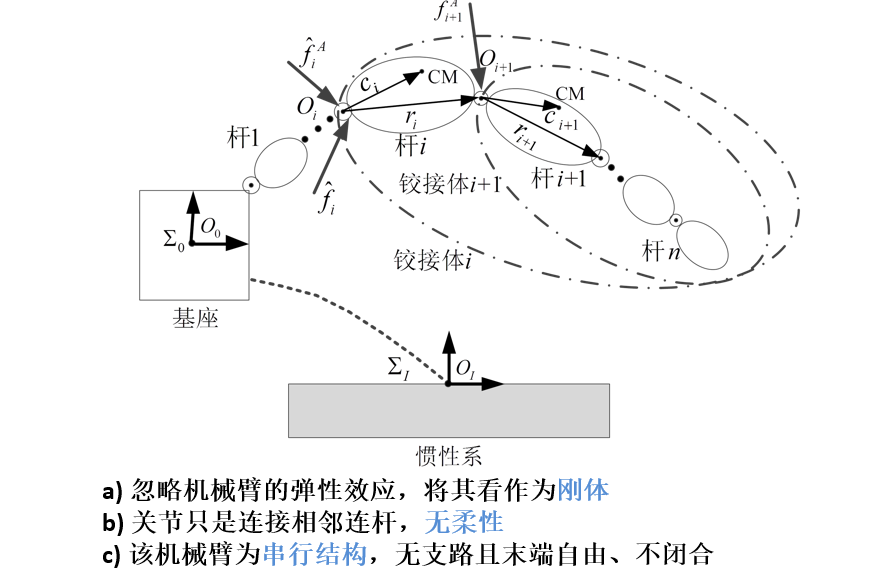
3 漂浮基座机器人动力学建模
算法流程包括:初始速度计算;运动学量向外递推;铰接体惯量向内递推;加速度向外递推计算
4 漂浮基座与固定机器人动力学建模的异同点
对于漂浮基座可以看作是通过6-DOFs的无质量的虚拟铰链将其与惯性系连接;则以漂浮基座为初始端的铰接体不受外力作用,对于自由飞行状态的空间机械臂,则可以将基座部分的控制力矩视为铰接体0所受到的外力。下面以漂浮基座为例说明空间矢量描述的ABA算法的扩展。
与固定基座动力学不同的是,漂浮基座动力学中运动学计算时基座的速度与加速度不为0。
坐标系的相对姿态变换一般用旋转矩阵表示,且利用欧拉角描述的刚体姿态会出现奇异问题,而.姿态全局无奇异至少需要4个参数表示,因此采用四元数表示基座姿态。某状态下四元数 ,载体相对于惯性系的位移分别为
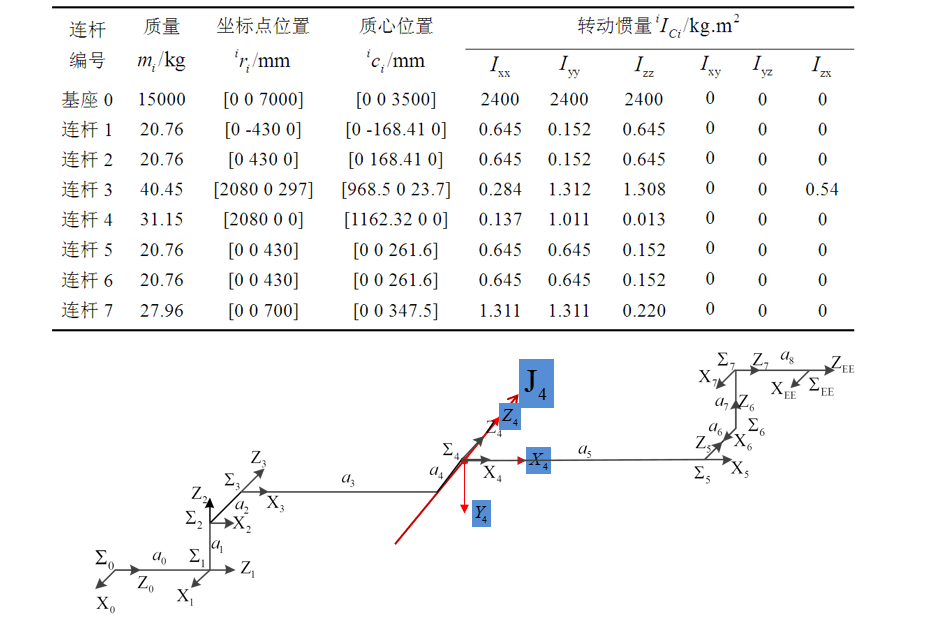
假设机械臂各个关节施加力矩值sin(t),0.5cos(t), 0.5sin(t),0.1cos(t), 0.1sin(t).0.05sin(t),0.01sin(t) Nm。由动力学计算得到基座扰动以及关节运动情况分别如图
总之,固定基座与漂浮基座机器人的动力学建模原理上是完全一致的。最主要的差别是基座运动情况的描述。固定基座机器人的基座速度和角速度均是0,基座没有任何运动。而漂浮基座机器人的基座是受到机器人本体运动的干扰的。二者动力学建模的具体形式是有差别的,具体的差别是在机器人的运动学不一致。
5 实验
正文完