单足机器人是作者科研生涯中的第一个机器人作品,虽然已经过去了接近10年,但是对于单足机器人的技术点仍然历历在目。在这里给大家分享下自己对单足机器人技术点的认识。
1 概述
单足跳跃机器人按照腿部构型的类型划分为两种:一种是直线型的腿部, 另一类是多关节的腿部。
|
单足跳跃机器人 |
特点 |
优点 |
|---|---|---|
|
直线型的腿部 |
使用气缸作为使机器人产生跳跃运动的元件 |
控制则相对简单 |
|
多关节的腿部 |
使用液压缸或者电机作为使机器人跳跃运动的 |
结构更接近生物的腿部结构, 稳定性更好 |
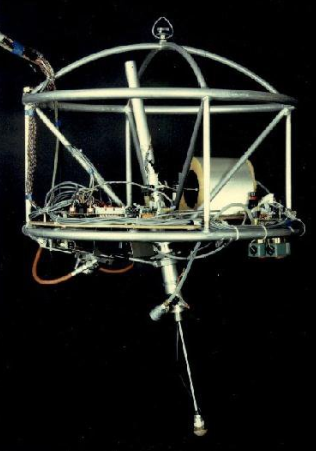
MIT 的单足跳跃机器人在结构上, 它有两个基本组成部分: 铝制机身和气动弹跳腿。 机身上布置着陀螺仪, 压力伺服阀等设备; 在活塞杆末端装有带软垫以减缓与地面。 机身与弹跳腿之间通过一个转动副或者球铰相连。
弹跳腿和机身之间的夹角通过调整二者之间的两个液压缸的伸长量来实现。 机器人上布置的传感器可以用来测量腿的长度、 每个液压缸的速度、 足部和地面之间的接触、 气缸上下腔的压力, 机器人机身的位置姿态。 这些传感器的信号传输至控制器, 对机器人的姿态进行实时调整。 其控制涉及到以下三个方面: 跳跃高度控制; 水平速度通过改变弹跳腿与铅垂方向的夹角来进行控制。 通过液压缸控制弹跳腿与机身之间的力矩, 进而实现对机器人姿态的调整。
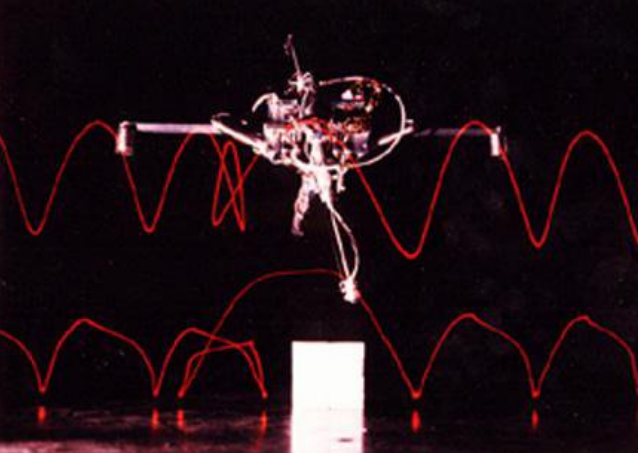
Monopod是一款平面单腿机器人。 Monopod的主要特点是使用了铰接式支腿,而不是以前的机器人中使用的伸缩支腿。 此外,与其他跑步机器人的空气弹簧不同,该腿的末端为板簧。 Monopod用于研究使用旋转接头的铰接式支腿的使用。 最终,独脚架的最高速度为2.3 m / s(5.1 mph),平均超过16 m。
铰接支腿具有机械优势,例如较低的惯性矩,较小的簧下质量,较大的运动范围,更大的紧凑性,更好的坚固性以及易于构造。 但是,铰接式支腿也增加了运动学上的复杂性以及自由度之间的耦合。 从两个关节的位移通常不会引起脚趾或臀部的正交位移这一事实可以明显看出这种耦合。
1999 年, 美国卡内基梅隆大学开发了平面跳跃的弓形腿机器人,可以实现稳定跳跃、 越障。 2001 年又研制出了能够在三维空间跳跃的弓形腿机器人.其采用了一种不同于气动弹跳腿的腿部结构, 使用的控制算法也与 Raibert 的不同, 其控制方法对对多足机器人的平衡控制有着重要的指导意义
最近几年,迪士尼新作品,能单腿持续蹦跶 7 秒的跳跳虎机器人。跳跳虎机器人躯干重量只是机器足的两倍,仅 30cm 高,约 2kg 重。
2 跳跃动作解析
单足机器人主体结构由机身 1、 弹跳腿气缸体 2、 支撑腿 3、 液压缸 4 和液压缸 5 组成, 主要辅助元件包括油管 6、 超声波传感器安装支架 7、 气动伺服阀 8、 超声波传感器 9、 球铰 10。 自 平衡跳跃原理为在机器人跳跃运动的腾空相, 根据机器人落地缓冲的需要通过气动位置伺服系统控制气缸活塞和下腔气压在机器人落地时刻前达到预设值, 根据机器人落地时刻的速度通过液压伺服系统控制两个液压缸的伸缩量, 调整弹跳腿相对机身 的摆角使支撑腿相对铅垂方向转角 的大小和方位满足约束条件。
针对跳跃机器人的研究多从弹簧负载倒立摆系统对跳跃机器人的着地阶段的运动特性进行分析。 弹簧一端与地面相连, 另一端连接在一个质量块上, 构成了弹簧负载倒立摆系统
单足机器人垂直跳跃运动过程主要分为三个阶段, 即缓冲阶段, 起跳阶段和腾空阶段, 其中, 缓冲阶段与起跳阶段合称为触地阶段。 机器人在起跳阶段需要对气缸上腔充入高压气体, 补充机器人在跳跃过程中损失的能量, 因此起跳阶段可以细化为起跳加压阶段和起跳恢复阶段,
(1) 缓冲阶段 缓冲阶段( ) 是指机器人足底接触地面到机身运动至最低点这段时间内机器人的运动。 在触地时刻, 机器人弹跳腿与地面发生非弹性碰撞, 使机器人弹跳腿的动能损失掉, 同时机器人机身在气缸上下腔压力差的作用下开始进行减速, 直至机器人机身的速度减为零。 在缓冲阶段, 机器人机身的机械能转换为克服摩擦力做功生成的热能和上腔气体被压缩而增加的内能。
(2) 起跳阶段 起跳阶段( ) 是指机器人机身从最低点到足底脱离地面这段时间内机器人的运动。 起跳加压阶段( ) 对机器人的上腔充入高压气体, 使机器人上腔的气体压力大于下腔的气体压力, 机器人机身在气缸上下腔气体压力差的作用下竖直向上加速运动。 起跳恢复阶段( ) 机器人上下腔封闭, 机器人机身在惯性的作用下继续向上运动, 下腔气体压力增大, 上腔气体压力减小, 当机器人腿部活塞杆受到的向上的推力大于向下的压力时,机器人足底脱离地面, 机器人开始跳跃。
(3) 腾空阶段 腾空阶段( ) 是指机器人足底脱离地面到机器人足底再次接触地面这段时间内机器人的运动。 腾空阶段机器人处于失重状态, 机器人机身的运动近似为自 由上抛运动, 并在控制要求下进行相应的调节。 在腾空阶段需要对机器人弹跳腿的活塞相对于气缸缸筒的位置, 以及气缸上下腔的气体压力进行调节。 为实现机器人的稳定跳跃, 需要保证机器人在每次触地的时刻机器人上下腔具有相同的气体压力, 同时活塞相对于气缸的位置相同, 从而使机器人在触地阶段对机器人调节的时候与上一周期相同。
- Lee, W., Raibert, M. H., 1991. Control of hoof rolling in an articulated leg. IEEE Robotics and Automation Conference, Sacramento.
- Raibert, M. H., Brown, H. B., Jr., Chepponis, M., Hodgins, J., Koechling, J., Dustman, D., Brennan, W. K., Barrett, D. S., Thompson, C. M., Hebert, J. D., Lee, W., and Borvansky, L., 1989. Dynamically Stable Legged Locomotion (September 1985-September 1989), AI Technical Report 1179, Massachusetts Institute of Technology.
- Ahmadi M, Buehler M. Stable control of a simulated one-legged running robot with hip and leg compliance[J]. IEEE transactions on robotics and automation, 1997, 13(1): 96-104.