1 模块化关节概述
模块化关节对于大都数关节机器人来说至关重要,没有模块化关节就很难完成机器人的设计与控制。模块化关节较为成熟的德国宇航局的技术。
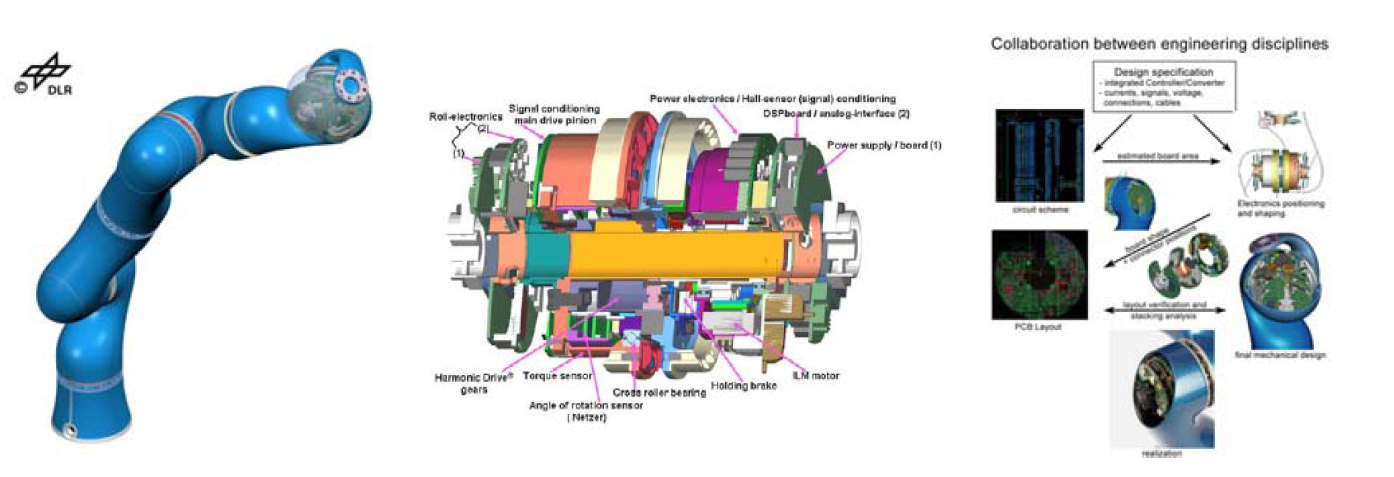
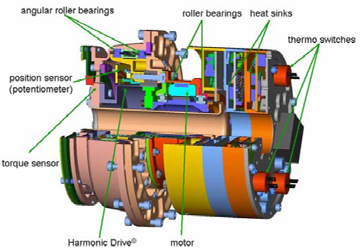
德国宇航中心基于第3代轻型臂开发的模块化双关节机器人ROKVISS,主要由电机、谐波减速器、力矩传感器、电位计、电加热器、热控开关和电气系统等组成。机械臂关节的特点:中心孔走线,实时串行通讯的总线结构,具有丰富的感知功能,如位置感知、力矩感知、温度感知以及电流感知,采用谐波减速器或行星减速器等减速机构,或者二者都采用,驱动一般采用直流无刷电机。
关节力矩传感器是机械臂柔性关节的重要传感元件。关节力矩传感器不仅为实现机械臂柔顺控制提供力感信息,而且可以用于关节的基于力矩反馈的位置控制。基于力矩反馈的位置控制系统对于提高低刚度的关节机器人的位置响应带宽和改善控制品质具有非常重要的作用。根据力的测量原理,力矩传感器一般采用应变式测量的方法。这种传感器的测量原理是基于弹性体元件在力作用下产生应变,粘贴在传感器弹性区上的电阻式应变片感知应变的大小,并通过处理电路将变形转换成电信号输出。应变式力/力矩传感器是目前研究最多、应用最广泛的一种力传感器。其优点是:结构简单、体积小、灵敏度高、动态响应快、结构紧凑、价格低、使用维修方便等;缺点是:加工工艺复杂、对信号调理电路的要求较高、应变片粘贴比较困难。

模块化关节的设计指标包括: 额定输出力矩,额定转速,质量,角位置精度,制动。
2 模块化关节的控制
模块化关节的控制系统部分包括:
|
组成 |
细分 |
|---|---|
|
传感器系统 |
传感器信后处理,多模态 |
|
通信系统 |
|
|
电源系统 |
24V,12V,5V |
|
驱动系统 |
电机驱动板 |
|
控制系统 |
制动系统,温控系统,电机控制 |
模块化关节的电路系统图如下所示:
一般来说,模块化关节的具体传感器布置包括:
|
名称 |
原理 |
|---|---|
|
力矩传感器 |
应变桥 |
|
关节位置传感器 |
电位计 |
|
限位开关 |
霍尔效应 |
|
温度传感器 |
热电式 |
|
电流传感器 |
霍尔效应 |
|
电机位置传感器 |
霍尔效应 |
3 模块化关节的Paul规划
由于机械臂上层和底层之间的通信周期不一致,且底层需要及时进行位置和力矩控制,因而底层需要保证实时性与低延迟。有必要在关节层对接受到的上层控制指令进行平滑处理。为了保证轨迹的位置速度和加速度连续,因而有必要采用Paulf规划,
为了保证由一个轨迹段转入下一个轨迹段时关节位置、速度和加速度的连续性,在所有路径点附近将关节位置定义为一个适当的函数,在一段轨迹结束之前提前进入下一个轨迹段的过渡,并且在下一段轨迹开始时完成过渡。
总之,模块化关节的设计对于机器人的设计和控制至关重要。需要进一步深入研究和探讨。
推荐文献:
G. Hirzinger. A. Albu-Schaffer. M. Hahnle. et al. On a new generation of torque controlled light-weight robots
G. Hirzinger. N. Sporer. A. Albu-Schaffer. et al. DLR’s torque-controlled light weight robot II –Are we reaching the technological limits now