1 刚性机器人的运动学与动力学
刚性机器人的动力学方程可以表示如下:
进而考虑刚性机器人的运动方程,一般来说运动方程包含位置级-速度级和加速度级,机器人关节和笛卡尔之间的关系具体表示如下:
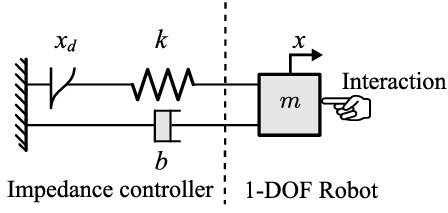
为机器人的运动学雅可比矩阵,其可以计算机器人的逆向运动学。此外雅可比矩阵可以将关节空间的外部作用力映射和笛卡尔空间的外部作用力关联,即 ,考虑机器人笛卡尔空间轨迹误差 则笛卡尔空间的阻抗控制率如下所示
2 刚性机器人笛卡尔动力学方程
上述给出的是机器人关节空间的运动力学方程,为了更好的给出机器人的笛卡尔孔家的阻抗空置率,首先给出机器人的逆向运动学
则关节空间机器人的动力学方程具体如下所示
对转化后的方程两边同时乘以
由此得到机器人的笛卡尔动力学方程
其中
,
3 笛卡尔阻抗控制
图片来源:here
由笛卡尔阻抗控制律可以得到:
将其带入到机器人笛卡尔动力学方程中
由此可以得到:
假设 ,则上式转化为
正文完